Un sensor en el sentit general és un dispositiu que converteix una quantitat física en una altra, convenient per al seu processament, transmissió o conversió posterior. Per regla general, la primera magnitud és física, no susceptible de mesura directa (temperatura, velocitat, desplaçament, etc.), i la segona és un senyal elèctric o òptic. Un nínxol en el camp dels instruments de mesura està ocupat per sensors, l'element principal dels quals és un inductor.
Contingut
Com funciona el sensor d'inductància i com funciona
Segons el principi de funcionament, els sensors inductius estan actius, és a dir, necessiten un generador extern per funcionar. Proporciona un senyal amb una freqüència i amplitud determinades a l'inductor.
El corrent que passa per les espires de la bobina crea un camp magnètic. Si un objecte conductor entra al camp magnètic, els paràmetres de la bobina canvien.Només queda arreglar aquest canvi.
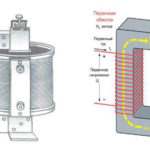
Els sensors senzills sense contacte reaccionen a l'aparició d'objectes metàl·lics a la zona propera del bobinatge. Això canvia la impedància de la bobina, aquest canvi s'ha de convertir en un senyal elèctric, amplificar i (o) fixar el pas del llindar mitjançant un circuit de comparació.
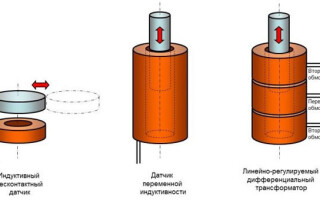
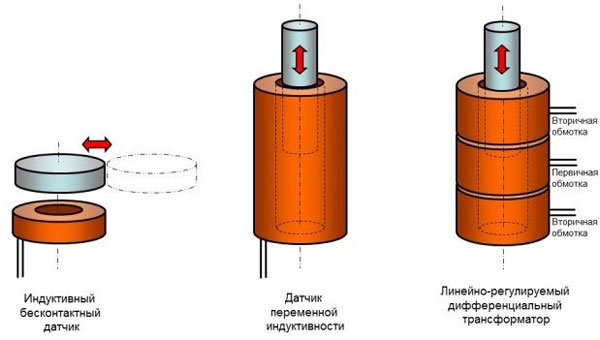
Els sensors d'un altre tipus responen als canvis en la posició longitudinal de l'objecte que serveix de nucli de la bobina. Quan la posició de l'objecte canvia, es mou dins o fora de la bobina, canviant així la seva inductància. Aquest canvi es pot convertir en un senyal elèctric i mesurar-lo. Una altra versió d'aquest sensor és quan un objecte s'acosta a la bobina des de l'exterior. Això fa que la inductància disminueixi a causa de l'efecte terra.
Una altra versió del sensor de desplaçament inductiu és un transformador diferencial ajustable linealment (LVDT). És una bobina composta, feta en l'ordre següent:
- bobinatge secundari 1;
- bobinatge primari;
- bobinatge secundari 2.
El senyal del generador s'alimenta al bobinatge primari. El camp magnètic creat per la bobina mitjana indueix un EMF en cadascun dels secundaris (principi del transformador). El nucli, quan es mou, modifica la connexió mútua entre les bobines, canviant la força electromotriu en cadascun dels bobinatges. Aquest canvi es pot fixar mitjançant el circuit de mesura. Atès que la longitud del nucli és menor que la longitud total de la bobina composta, la posició de l'objecte es pot determinar sense ambigüitats per la relació EMF als bobinatges secundaris.
En el mateix principi, un canvi en l'acoblament inductiu entre els bobinatges, es construeix un sensor de gir.Consta de dues bobines coaxials. El senyal s'aplica a un dels bobinatges, l'EMF en el segon depèn de l'angle de gir mutu.
Des del principi de funcionament, és obvi que els sensors inductius, independentment del disseny, són sense contacte. Treballen a distància i no requereixen contacte directe amb l'objecte controlat.
Avantatges i inconvenients dels sensors inductius
Els avantatges dels sensors de tipus inductiu inclouen principalment:
- fiabilitat del disseny;
- manca de connexions de contacte;
- alta potència de sortida, que redueix la influència del soroll i simplifica el circuit de control;
- alta sensibilitat;
- la capacitat de treballar a partir de fonts de tensió alterna de freqüència industrial.
El principal desavantatge dels sensors de tipus inductiu és la seva mida, pes i complexitat de fabricació. Per bobinar bobines amb els paràmetres indicats, es requereix un equip especial. A més, la necessitat de mantenir amb precisió l'amplitud del senyal de l'oscil·lador mestre es considera un negatiu. Quan canvia, l'àrea de sensibilitat també canvia. Com que els sensors funcionen només amb corrent altern, mantenir l'amplitud es converteix en un cert problema tècnic. Directament (o mitjançant un transformador reductor) no serà possible connectar el sensor a una xarxa domèstica o industrial; en ella, les fluctuacions de tensió en amplitud o freqüència poden arribar fins i tot al 10% en mode normal, cosa que fa que la precisió de la mesura sigui inacceptable. .
A més, la precisió de la mesura es pot veure afectada per:
- camps magnètics de tercers (la protecció del sensor és impossible segons el principi del seu funcionament);
- captadors EMF de tercers en cables de subministrament i mesura;
- errors de fabricació;
- error característic del sensor;
- jocs o deformacions al lloc d'instal·lació del sensor que no afecten el rendiment general;
- dependència de la precisió de la temperatura (els paràmetres del cable de bobinatge canvien, inclosa la seva resistència).
La incapacitat dels sensors d'inductància per respondre a l'aparició d'objectes dielèctrics en el seu camp magnètic es pot atribuir tant als avantatges com als desavantatges. D'una banda, això limita l'àmbit de la seva aplicació. D'altra banda, fa que sigui insensible a la presència de brutícia, greix, sorra, etc. en els objectes monitoritzats.
El coneixement de les mancances i possibles limitacions en el funcionament dels sensors inductius permet un ús racional dels seus avantatges.
Abast dels sensors inductius
Els sensors de proximitat inductius s'utilitzen sovint com a interruptors de límit. Aquests dispositius s'han generalitzat:
- en sistemes de seguretat, com a sensors d'obertura no autoritzada de finestres i portes;
- en sistemes de telemecànica, com a sensors de la posició final d'unitats i mecanismes;
- a la vida quotidiana en els esquemes per indicar la posició tancada de portes, persianes;
- per comptar objectes (per exemple, moure's per la cinta transportadora);
- determinar la velocitat de rotació dels engranatges (cada dent, passant pel sensor, crea un impuls);
- en altres situacions.

Els codificadors angulars es poden utilitzar per determinar els angles de rotació d'eixos, engranatges i altres components giratoris, així com codificadors absoluts. A més, aquests dispositius es poden utilitzar en màquines-eina i dispositius robòtics juntament amb sensors de posició lineal. On cal saber exactament la posició dels nodes dels mecanismes.
Exemples pràctics d'implantació de sensors inductius
A la pràctica, els dissenys de sensors inductius es poden implementar de diferents maneres. L'execució i inclusió més senzilla és per a un sensor únic de dos cables, que controla la presència d'objectes metàl·lics a la seva zona de sensibilitat. Aquests dispositius sovint es fabriquen a partir d'un nucli en forma d'E, però aquest no és un punt fonamental. Aquesta implementació és més fàcil de fabricar.
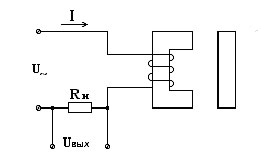
Quan la resistència de la bobina canvia, el corrent al circuit i la caiguda de tensió a través de la càrrega canvien. Aquests canvis es poden cometre. El problema és que la resistència de càrrega esdevé crítica. Si és massa gran, els canvis de corrent quan aparegui un objecte metàl·lic seran relativament petits. Això redueix la sensibilitat i la immunitat al soroll del sistema. Si és petit, el corrent al circuit serà gran, caldrà un sensor més resistent.
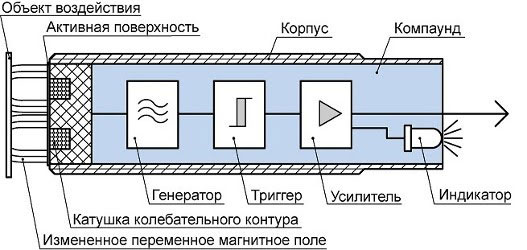
Per tant, hi ha dissenys en què el circuit de mesura està integrat a la carcassa del sensor. El generador genera polsos que alimenten l'inductor. Quan s'arriba a un cert nivell, el disparador s'activa, passant de l'estat 0 a 1 o viceversa. L'amplificador de memòria intermèdia amplifica el senyal en termes de potència i (o) tensió, il·lumina (apaga) el LED i emet un senyal discret al circuit extern.
El senyal de sortida es pot formar:
- per electromagnètica o relé d'estat sòlid – nivell de tensió zero o un;
- "contacte sec" relé electromagnètic;
- col·lector obert transistor (estructures n-p-n o p-n-p).
En aquest cas, calen tres cables per connectar el sensor:
- menjar;
- cable comú (0 volts);
- cable de senyal.
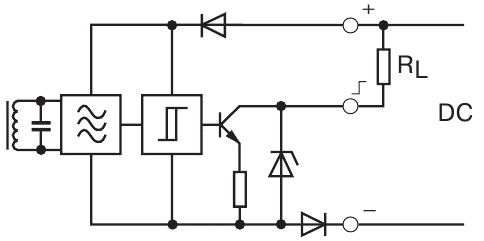
Aquests sensors també es poden alimentar amb tensió de CC. Els polsos a la inductància es formen mitjançant un generador intern.
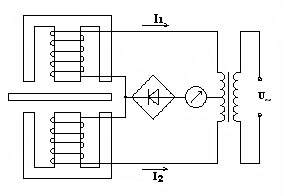
Els codificadors diferencials s'utilitzen per al control de la posició. Si l'objecte controlat és simètric respecte a ambdues bobines, el corrent que les travessa és el mateix. Quan qualsevol bobinatge es desplaça cap al camp, es produeix un desequilibri, el corrent total deixa de ser igual a zero, que es pot registrar amb un indicador amb una fletxa al mig de l'escala. L'indicador es pot utilitzar per determinar tant la magnitud del canvi com la seva direcció. En lloc d'un dispositiu punter, es pot utilitzar un esquema de control que, en rebre informació sobre un canvi de posició, emetrà un senyal, prendrà mesures per alinear l'objecte, realitzarà ajustos en el procés tecnològic, etc.

Els sensors fets segons el principi dels transformadors diferencials ajustables linealment es produeixen en forma d'estructures completes, que són un marc amb bobinatges primaris i secundaris i una vareta que es mou a l'interior (pot ser carregat per molla). Els cables es treuen per enviar un senyal des del generador i eliminar l'EMF dels bobinatges secundaris. Un objecte controlat es pot connectar mecànicament a la vareta. També es pot fer d'un dielèctric: només la posició de la tija importa per a la mesura.
Malgrat certes deficiències inherents, el sensor inductiu tanca moltes àrees associades a la detecció sense contacte d'objectes a l'espai.Tot i el desenvolupament constant de la tecnologia, aquest tipus d'aparells no sortiran del mercat d'aparells de mesura en un futur previsible, perquè el seu funcionament es basa en les lleis fonamentals de la física.
Articles semblants: