La ciència en el camp de l'electricitat als segles XIX i XX es va desenvolupar ràpidament, la qual cosa va donar lloc a la creació de motors elèctrics d'inducció. Amb l'ajuda d'aquests dispositius, el desenvolupament de la indústria industrial ha avançat molt i ara és impossible imaginar plantes i fàbriques sense màquines de potència amb motors elèctrics asíncrons.
Contingut
Història de l'aparició
La història de la creació d'un motor elèctric asíncron comença l'any 1888, quan Nikola Tesla va patentar un circuit de motor elèctric, el mateix any un altre científic del camp de l'enginyeria elèctrica Galileu Ferraris va publicar un article sobre els aspectes teòrics del funcionament d'una màquina asíncrona.
El 1889 el físic rus Mikhail Osipovich Dolivo-Dobrovolsky va rebre una patent a Alemanya per a un motor elèctric asíncron trifàsic.

Tots aquests invents van permetre millorar les màquines elèctriques i van donar lloc a l'ús massiu de les màquines elèctriques a la indústria, la qual cosa va accelerar notablement tots els processos tecnològics en producció, va augmentar l'eficiència del treball i va reduir la seva intensitat laboral.
Actualment, el motor elèctric més utilitzat a la indústria és el prototip de màquina elèctrica creat per Dolivo-Dobrovolsky.
El dispositiu i principi de funcionament d'un motor asíncron
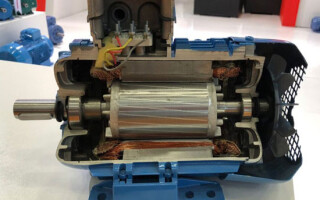
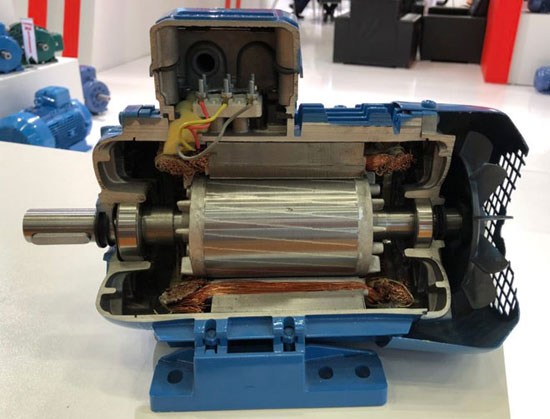
Els components principals d'un motor d'inducció són l'estator i el rotor, que estan separats entre si per un buit d'aire. El treball actiu al motor el realitzen els bobinatges i el nucli del rotor.
L'asincronia del motor s'entén com la diferència entre la velocitat del rotor i la freqüència de rotació del camp electromagnètic.
estator - Aquesta és una part fixa del motor, el nucli del qual està fet d'acer elèctric i està muntat al bastidor. El llit està fet d'un material que no és magnètic (ferro colat, alumini). Els bobinatges de l'estator són un sistema trifàsic en què els cables es col·loquen en ranures amb un angle de deflexió de 120 graus. Les fases dels bobinatges estan connectades de manera estàndard a la xarxa segons els esquemes "estrella" o "triangle".

Rotor És la part mòbil del motor. Els rotors dels motors elèctrics asíncrons són de dos tipus: amb gàbia d'esquirol i rotors de fase. Aquests tipus es diferencien entre si en els dissenys del bobinatge del rotor.
Motor asíncron de gàbia d'esquirol
Aquest tipus de màquina elèctrica va ser patentada per primera vegada per M.O. Dolivo-Dobrovolsky i s'anomena popularment "roda d'esquirol" per l'aspecte de l'estructura. El bobinatge del rotor en curtcircuit està format per barres de coure curtcircuitades amb anells (alumini, llautó) i inserit a les ranures del bobinat del nucli del rotor. Aquest tipus de rotor no té contactes mòbils, per la qual cosa aquests motors són molt fiables i duradors en funcionament.
Motor d'inducció amb rotor de fase
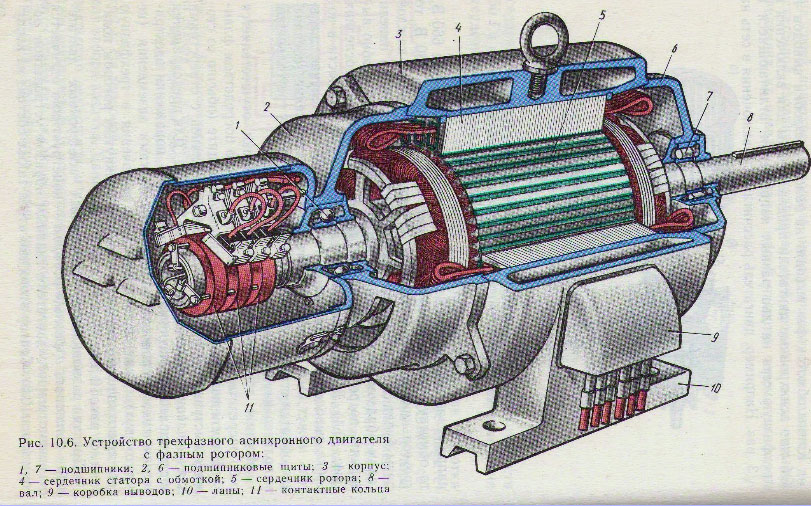
Aquest dispositiu us permet ajustar la velocitat de treball en una àmplia gamma. El rotor de fase és un bobinatge trifàsic, que està connectat segons els esquemes "estrella" o triangle. En aquests motors elèctrics, hi ha raspalls especials en el disseny, amb els quals podeu ajustar la velocitat del rotor. Si s'afegeix un reòstat especial al mecanisme d'aquest motor, quan s'engega el motor, la resistència activa disminuirà i, per tant, els corrents d'arrencada disminuiran, cosa que afecta negativament la xarxa elèctrica i el propi dispositiu.
Principi de funcionament
Quan s'aplica un corrent elèctric als bobinats de l'estator, es produeix un flux magnètic. Atès que les fases es desplacen entre si 120 graus, per això el flux dels bobinatges gira. Si el rotor està en curtcircuit, amb aquesta rotació, apareix un corrent al rotor, que crea un camp electromagnètic. Interaccionant entre ells, els camps magnètics del rotor i l'estator fan que el rotor del motor elèctric giri. Si el rotor és en fase, llavors s'aplica tensió a l'estator i al rotor simultàniament, apareix un camp magnètic a cada mecanisme, interactuen entre ells i fan girar el rotor.
Avantatges dels motors asíncrons
| amb rotor de gàbia d'esquirol | Amb rotor de fase |
|---|---|
| 1. Dispositiu simple i circuit de llançament | 1. Petita corrent d'arrencada |
| 2. Baix cost de fabricació | 2. Capacitat d'ajustar la velocitat de rotació |
| 3. Amb l'augment de la càrrega, la velocitat de l'eix no canvia | 3. Treballar amb petites sobrecàrregues sense canviar la velocitat |
| 4. Capaç de suportar sobrecàrregues a curt termini | 4. Es pot aplicar l'arrencada automàtica |
| 5. Funcionament fiable i durador | 5. Té un gran parell |
| 6. Apte per a totes les condicions de treball | |
| 7. Té una alta eficiència |
Inconvenients dels motors asíncrons
| amb rotor de gàbia d'esquirol | Amb rotor de fase |
|---|---|
| 1. La velocitat del rotor no és ajustable | 1. Grans dimensions |
| 2. Petit parell d'arrencada | 2. L'eficiència és menor |
| 3. Alt corrent d'arrencada | 3. Manteniment freqüent per desgast del raspall |
| 4. Una certa complexitat del disseny i la presència de contactes mòbils |
Els motors asíncrons són dispositius molt eficients amb unes excel·lents característiques mecàniques, la qual cosa els converteix en líders en freqüència d'ús.
Modes de funcionament

Un motor elèctric de tipus asíncron és un mecanisme universal i té diversos modes per a la durada del funcionament:
- Contínua;
- Curt termini;
- periòdic;
- Repetició a curt termini;
- Especial.
Mode continu - el principal mode de funcionament dels dispositius asíncrons, que es caracteritza pel funcionament constant del motor elèctric sense parades amb una càrrega constant. Aquest mode de funcionament és el més comú, utilitzat a les empreses industrials de tot arreu.
Modalitat momentània - funciona fins que s'aconsegueix una càrrega constant durant un temps determinat (De 10 a 90 minuts), no tenir temps d'escalfar tant com sigui possible. Després d'això s'apaga. Aquest mode s'utilitza quan es subministra substàncies de treball (aigua, petroli, gas) i altres situacions.
Mode periòdic - la durada del treball té un valor determinat i s'apaga al final del cicle de treball. Mode de funcionament inici-parada de treball. Al mateix temps, es pot apagar durant un temps durant el qual no té temps de refredar-se a temperatures externes i tornar a engegar-se.
Mode intermitent - el motor no s'escalfa al màxim, però tampoc té temps de refredar-se a la temperatura exterior. S'utilitza en ascensors, escales mecàniques i altres dispositius.
règim especial - La durada i el període d'inclusió és arbitrari.
En enginyeria elèctrica, hi ha un principi de reversibilitat de les màquines elèctriques: això significa que el dispositiu pot convertir l'energia elèctrica en energia mecànica i realitzar les accions oposades.
Els motors elèctrics asíncrons també corresponen a aquest principi i tenen un mode de funcionament de motor i generador.
Mode motor - el principal mode de funcionament d'un motor elèctric asíncron. Quan s'aplica tensió als bobinatges, sorgeix un parell electromagnètic, arrossegant el rotor amb l'eix, i així l'eix comença a girar, el motor assoleix una velocitat constant, fent un treball útil.
mode generador - basat en el principi d'excitació del corrent elèctric en els bobinats del motor durant la rotació del rotor. Si el rotor del motor gira mecànicament, es forma una força electromotriu als bobinats de l'estator, en presència d'un condensador als bobinats, es produeix un corrent capacitiu.Si la capacitat del condensador és un valor determinat, depenent de les característiques del motor, el generador s'autoexcitarà i apareixerà un sistema de tensió trifàsica. Així, el motor de gàbia d'esquirol funcionarà com a generador.
Control de velocitat de motors asíncrons
Per regular la velocitat de gir dels motors elèctrics asíncrons i controlar els seus modes de funcionament, hi ha els mètodes següents:
- Freqüència: quan canvia la freqüència del corrent a la xarxa elèctrica, canvia la freqüència de rotació del motor elèctric. Per a aquest mètode, s'utilitza un dispositiu anomenat convertidor de freqüència;
- Reostàtica: quan canvia la resistència del reòstat al rotor, canvia la velocitat de rotació. Aquest mètode augmenta el parell d'arrencada i el lliscament crític;
- Pols: un mètode de control en què s'aplica un tipus especial de tensió al motor.
- Canviar els bobinatges durant el funcionament del motor elèctric del circuit "estrella" al circuit "triangle", que redueix els corrents d'arrencada;
- Control de canvi de parells de pols per a rotors de gàbia d'esquirol;
- Connexió de reactància inductiva per a motors amb rotor bobinat.
Amb el desenvolupament de sistemes electrònics, el control de diversos motors elèctrics de tipus asíncron és cada cop més eficient i precís. Aquests motors s'utilitzen a tot el món, la varietat de tasques realitzades per aquests mecanismes creix cada dia i la necessitat d'ells no disminueix.
Articles semblants: