La modulació és un procés elèctric no lineal en el qual els paràmetres d'un senyal (portadora) es canvien mitjançant un altre senyal (modulació, informació). En tecnologia de comunicació, la modulació de freqüència, amplitud i fase s'utilitza àmpliament. En l'electrònica de potència i la tecnologia de microprocessador, la modulació d'amplada de pols s'ha generalitzat.
Contingut
Què és PWM (modulació d'amplada de pols)
Amb la modulació d'amplada de pols del senyal original, l'amplitud, la freqüència i la fase del senyal original romanen sense canvis. La durada (amplada) del pols rectangular està subjecta a canvis sota l'acció del senyal d'informació. A la literatura tècnica anglesa, s'abreuja com PWM - modulació d'amplada de pols.
Com funciona PWM
El senyal modulat d'amplada de pols es forma de dues maneres:
- analògic;
- digital.
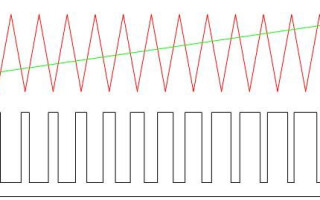
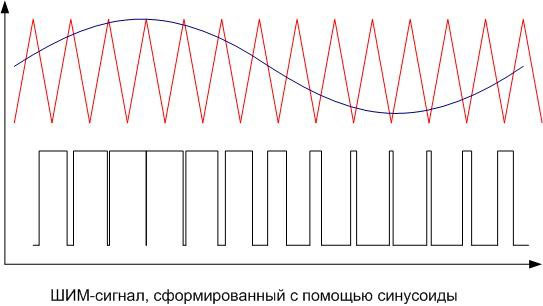
Amb el mètode analògic de crear un senyal PWM, un portador en forma de dent de serra o senyal triangular s'alimenta a un inversor. entrada del comparador, i informació - sobre la no inversió. Si el nivell de la portadora instantània és superior al senyal de modulació, la sortida del comparador és zero, si és inferior, un. La sortida és un senyal discret amb una freqüència corresponent a la freqüència del triangle portador o serra, i una longitud de pols proporcional al nivell de la tensió moduladora.
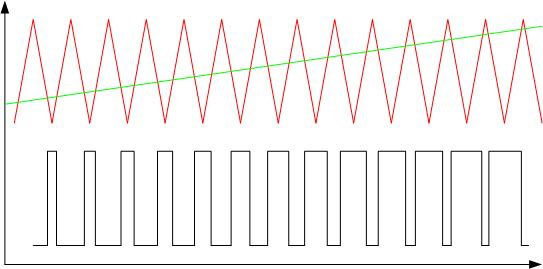
Com a exemple, la modulació d'amplada de pols d'un senyal triangular augmenta linealment. La durada dels polsos de sortida és proporcional al nivell del senyal de sortida.
Els controladors PWM analògics també estan disponibles en forma de microcircuits preparats, dins dels quals s'instal·len un comparador i un circuit de generació de portadors. Hi ha entrades per connectar elements externs de configuració de freqüència i subministrar un senyal d'informació. S'elimina un senyal de la sortida que controla les claus externes potents. També hi ha entrades per a la retroalimentació: són necessàries per mantenir els paràmetres de control establerts. Així, per exemple, és el xip TL494. Per als casos en què la potència del consumidor és relativament petita, hi ha disponibles controladors PWM amb claus integrades. La clau interna del microcircuit LM2596 està dissenyada per a corrents de fins a 3 amperes.
El mètode digital es realitza mitjançant microcircuits o microprocessadors especialitzats. La durada del pols està controlada pel programa intern. Molts microcontroladors, inclosos els populars PIC i AVR, tenen un mòdul integrat per a la implementació de maquinari de PWM "a bord", per rebre un senyal PWM, cal activar el mòdul i establir els seus paràmetres de funcionament.Si aquest mòdul no està disponible, PWM es pot organitzar exclusivament per programari, això no és difícil. Aquest mètode ofereix més potència i llibertat mitjançant l'ús flexible de les sortides, però utilitza més recursos del controlador.
Característiques del senyal PWM
Les característiques importants del senyal PWM són:
- amplitud (U);
- freqüència (f);
- cicle de treball (S) o cicle de treball D.
L'amplitud en volts s'estableix en funció de la càrrega. Ha de proporcionar la tensió nominal d'alimentació del consumidor.
La freqüència del senyal modulada per l'amplada del pols es selecciona a partir de les consideracions següents:
- Com més gran sigui la freqüència, més gran serà la precisió del control.
- La freqüència no ha de ser inferior al temps de resposta del dispositiu controlat per PWM, en cas contrari es produiran ondulacions notables del paràmetre controlat.
- Com més gran sigui la freqüència, més grans són les pèrdues de commutació. Sorgeix del fet que el temps de commutació de la clau és finit. En l'estat de bloqueig, tota la tensió d'alimentació cau a l'element clau, però gairebé no hi ha corrent. En estat obert, el corrent de càrrega completa flueix per la clau, però la caiguda de tensió és petita, ja que la resistència de rendiment és d'uns pocs ohms. En ambdós casos, la dissipació de potència és insignificant. La transició d'un estat a un altre es produeix ràpidament, però no a l'instant. En el procés de desbloqueig-bloqueig, una gran tensió cau sobre un element parcialment obert i, al mateix temps, hi passa un corrent important. En aquest moment, la potència dissipada arriba a valors elevats. Aquest període és curt, la clau no té temps d'escalfar-se significativament.Però amb un augment de la freqüència d'aquests intervals de temps per unitat de temps, augmenta i les pèrdues de calor augmenten. Per tant, per construir claus, és important utilitzar elements ràpids.
- En conduir motor elèctric la freqüència s'ha d'allunyar de l'àrea audible per a una persona: 25 kHz o més. Perquè a una freqüència PWM més baixa, es produeix un xiulet desagradable.
Aquests requisits solen estar en conflicte entre ells, de manera que l'elecció de la freqüència en alguns casos és un compromís.
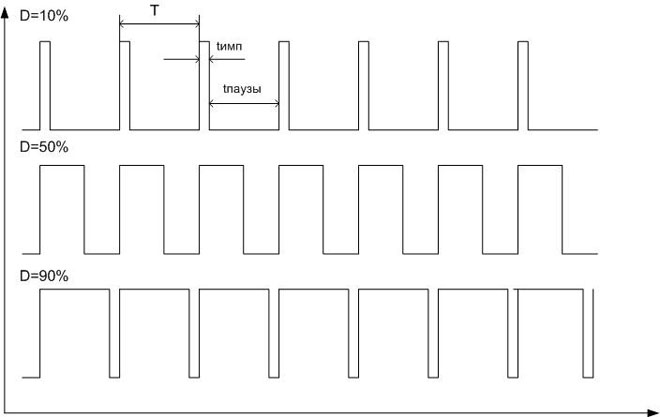
El valor de modulació caracteritza el cicle de treball. Com que la freqüència de repetició del pols és constant, la durada del període també és constant (T=1/f). El període consta d'un impuls i una pausa, amb una durada, respectivament, timp i tpauses, i timp+tpauses=T. El cicle de treball és la relació entre la durada del pols i el període - S \u003d timp/T. Però a la pràctica va resultar més convenient utilitzar el valor recíproc: el factor d'ompliment: D=1/S=T/timp. És encara més convenient expressar el factor d'ompliment com a percentatge.
Quina diferència hi ha entre PWM i SIR
A la literatura tècnica estrangera no hi ha cap diferència entre la modulació d'amplada de pols i la regulació d'amplada de pols (PWR). Els especialistes russos estan intentant distingir entre aquests conceptes. De fet, PWM és un tipus de modulació, és a dir, canvis en el senyal portador sota la influència d'un altre, modulant. El senyal portador actua com a portador d'informació i el senyal modulador estableix aquesta informació. I la regulació de l'amplada del pols és la regulació del mode de càrrega mitjançant PWM.
Raons i aplicacions de PWM
S'utilitza el principi de modulació d'amplada de pols controladors de velocitat de potents motors asíncrons. En aquest cas, el senyal de modulació de freqüència ajustable (monofàsica o trifàsica) és generat per un generador d'ona sinusoïdal de baixa potència i superposat a la portadora de manera analògica. La sortida és un senyal PWM, que s'alimenta a les tecles de la potència requerida. A continuació, podeu passar la seqüència de polsos resultant a través d'un filtre de pas baix, per exemple, a través d'un circuit RC senzill, i seleccionar el sinusoide original. O podeu prescindir-ne: la filtració es produirà de manera natural a causa de la inèrcia del motor. Òbviament, com més gran sigui la freqüència de la portadora, més propera és la forma d'ona de sortida de la sinusoide original.
Sorgeix una pregunta natural: per què és impossible amplificar immediatament el senyal del generador, per exemple, utilitzant transistors potents? Perquè un element regulador que funciona en un mode lineal redistribuirà la potència entre la càrrega i la clau. En aquest cas, es malgasta una potència important en l'element clau. Si un element de control potent funciona en un mode clau (trinistor, triac, transistor RGBT), aleshores la potència es distribueix al llarg del temps. Les pèrdues seran molt menors i l'eficiència serà molt més gran.
En tecnologia digital, no hi ha cap alternativa particular a la regulació de l'amplada del pols. L'amplitud del senyal és constant allà, la tensió i el corrent només es poden canviar modulant el portador al llarg de l'amplada del pols i, posteriorment, fent-ne la mitjana. Per tant, PWM s'utilitza per regular la tensió i el corrent en aquells objectes que poden promediar el senyal de pols. La mitjana es produeix de diferents maneres:
- a causa de la inèrcia de càrrega.Així, la inèrcia tèrmica dels escalfadors termoelèctrics i les làmpades incandescents permet que els objectes regulats no es refredin notablement en les pauses entre polsos.
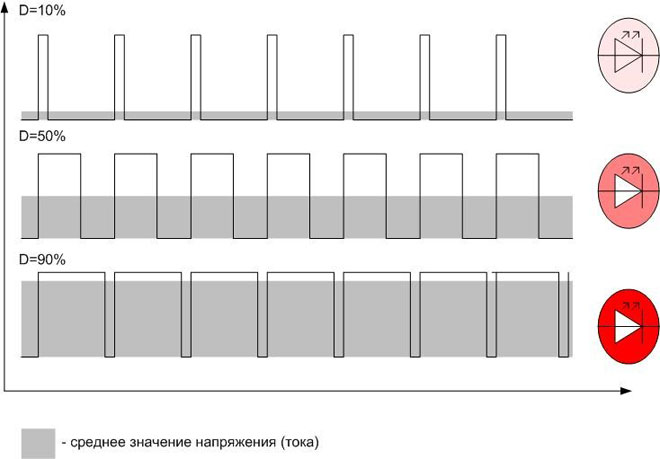
- A causa de la inèrcia de la percepció. El LED té temps d'apagar-se de pols a pols, però l'ull humà no se n'adona i el percep com una resplendor constant amb intensitat variable. Aquest principi s'utilitza per controlar la brillantor dels punts dels monitors LED. Però un parpelleig imperceptible amb una freqüència de diversos centenars d'hertzs encara està present i provoca fatiga ocular.
- degut a la inèrcia mecànica. Aquesta propietat s'utilitza en el control de motors DC raspallats. Amb una freqüència de regulació correctament seleccionada, el motor no té temps de frenar en pauses mortes.
Per tant, s'utilitza PWM quan el valor mitjà de tensió o corrent té un paper decisiu. A més dels casos habituals esmentats, el mètode PWM regula el corrent mitjà en màquines de soldadura i carregadors de bateries, etc.
Si la mitjana natural no és possible, en molts casos aquest paper pot ser assumit pel filtre de pas baix ja esmentat (LPF) en forma de cadena RC. A efectes pràctics, això és suficient, però cal entendre que és impossible aïllar el senyal original del PWM mitjançant un filtre de pas baix sense distorsió. Després de tot, l'espectre PWM conté un nombre infinit d'harmònics que inevitablement cauran a la banda de pas del filtre. Per tant, no s'ha de fer il·lusions sobre la forma de la sinusoide reconstruïda.
Control LED PWM RGB molt eficient i eficaç. Aquest dispositiu té tres enllaços p-n: vermell, blau i verd.Si canvieu per separat la brillantor de la brillantor de cada canal, podeu obtenir gairebé qualsevol color de la brillantor LED (a excepció del blanc pur). Les possibilitats de crear efectes d'il·luminació amb PWM són infinites.
L'aplicació més habitual d'un senyal digital modulat en amplada de pols és controlar el corrent o la tensió mitjana que flueix per una càrrega. Però també és possible l'ús no estàndard d'aquest tipus de modulació. Tot depèn de la imaginació del desenvolupador.
Articles semblants: